Arrow visualization¶
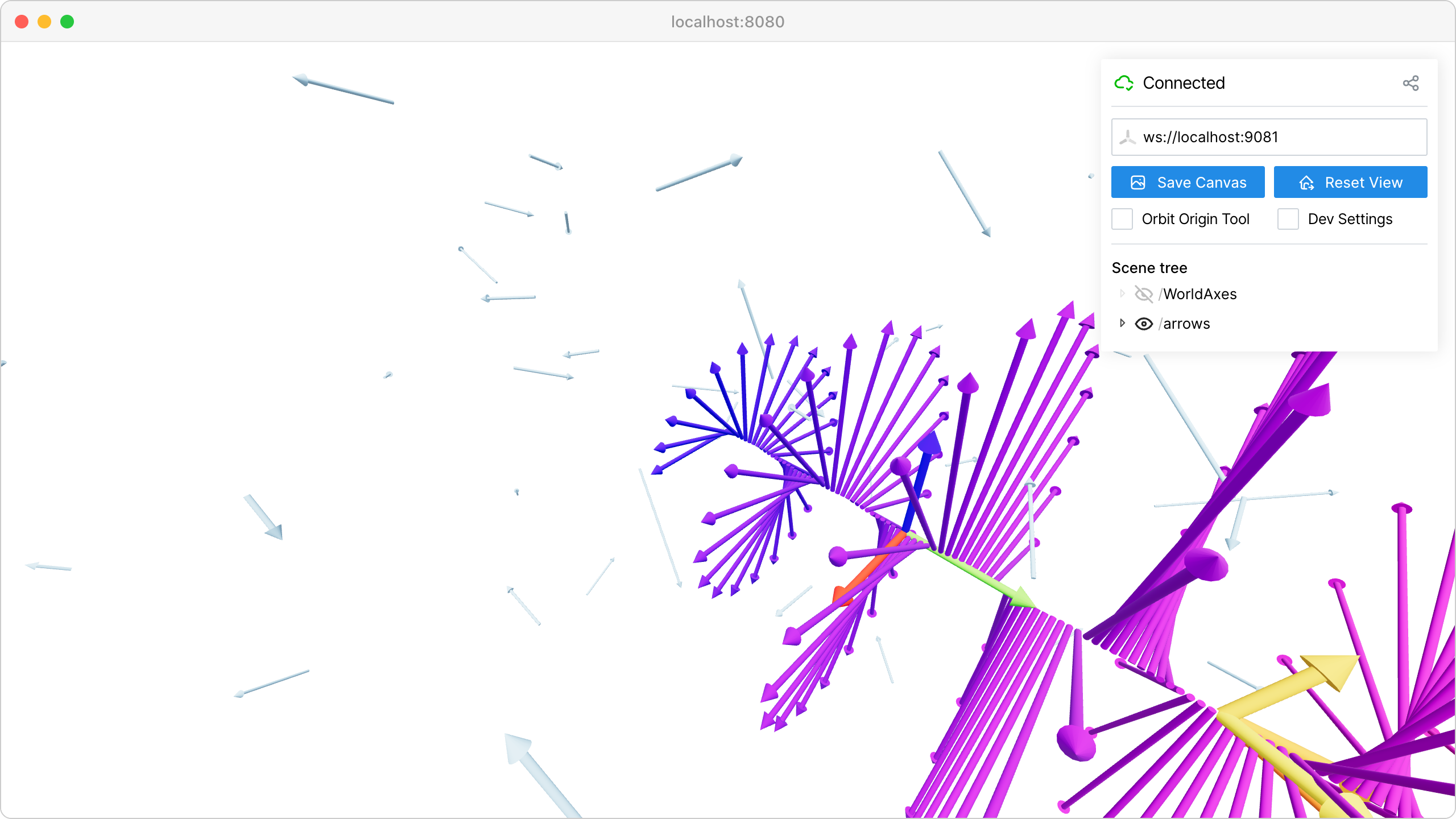
Create arrows for visualizing vectors, directions, and quantities in 3D space.
This example demonstrates viser’s arrow rendering capabilities, which are useful for visualizing directions, forces, velocities, and other vector quantities common in robotics and computer vision applications.
Use cases:
Perception rays in robotics and 3D sensing
Force vectors (contact forces, thruster forces)
Velocity vectors (commanded or actual velocities)
Axes of rotation and angular velocities
Coordinate frame directions
Arrows are batched into a single call for efficiency, similar to line segments. Each arrow is defined by a start point and end point, with configurable shaft radius, head radius, and head length.
Source: examples/01_scene/11_arrows.py
Code¶
1import time
2
3import numpy as np
4
5import viser
6
7
8def main() -> None:
9 server = viser.ViserServer()
10
11 # Batched arrows.
12 #
13 # Create multiple arrows in a single call for efficiency.
14 # points shape: (N, 2, 3) where points[i, 0] is the start and points[i, 1] is the end.
15 N = 200
16 points = np.zeros((N, 2, 3), dtype=np.float32)
17 colors = np.zeros((N, 3), dtype=np.uint8)
18
19 for i in range(N):
20 # Distribute arrows in a spiral pattern.
21 theta = i * 0.3
22 r = 1.0 + i * 0.02
23 x = r * np.cos(theta)
24 y = i * 0.05
25 z = r * np.sin(theta)
26
27 points[i, 0] = [0, y, 0] # start
28 points[i, 1] = [x, y, z] # end
29
30 # Color gradient from blue to red based on height.
31 color_value = int(255 * (y / (N * 0.05)))
32 colors[i] = [color_value, 0, 255 - color_value]
33
34 server.scene.add_arrows(
35 "/arrows/spiral",
36 points=points,
37 colors=colors,
38 shaft_radius=0.02,
39 head_radius=0.05,
40 head_length=0.1,
41 )
42
43 # Coordinate frame arrows.
44 #
45 # Arrows are useful for visualizing coordinate frames and axes.
46 origin = [0, 2, 0]
47 frame_points = np.array(
48 [
49 [origin, [1, 2, 0]], # X axis
50 [origin, [0, 3, 0]], # Y axis
51 [origin, [0, 2, 1]], # Z axis
52 ],
53 dtype=np.float32,
54 )
55 frame_colors = np.array(
56 [
57 [255, 0, 0], # X: red
58 [0, 255, 0], # Y: green
59 [0, 0, 255], # Z: blue
60 ],
61 dtype=np.uint8,
62 )
63 server.scene.add_arrows(
64 "/arrows/frame",
65 points=frame_points,
66 colors=frame_colors,
67 shaft_radius=0.03,
68 head_radius=0.08,
69 head_length=0.15,
70 )
71
72 # Force vectors example.
73 #
74 # Arrows can represent forces on an object. Here we show
75 # contact forces on a simple object at position (0, 4, 0).
76 contact_point = [0, 4, 0]
77 force_points = np.array(
78 [
79 [contact_point, [0.5, 4.5, 0.3]],
80 [contact_point, [-0.3, 4.8, -0.2]],
81 [contact_point, [0.1, 5.2, -0.4]],
82 [contact_point, [-0.4, 4.3, 0.5]],
83 ],
84 dtype=np.float32,
85 )
86 force_colors = np.array(
87 [[255, 200, 0], [255, 100, 0], [255, 50, 0], [255, 150, 0]],
88 dtype=np.uint8,
89 )
90 server.scene.add_arrows(
91 "/arrows/forces",
92 points=force_points,
93 colors=force_colors,
94 shaft_radius=0.04,
95 head_radius=0.1,
96 head_length=0.2,
97 )
98
99 # Uniform color arrows.
100 #
101 # For simple visualization, a single color can be applied to all arrows.
102 N_velocities = 50
103 vel_starts = np.random.normal(size=(N_velocities, 3)).astype(np.float32) * 3
104 vel_ends = (
105 vel_starts + np.random.normal(size=(N_velocities, 3)).astype(np.float32) * 0.5
106 )
107 velocity_points = np.stack([vel_starts, vel_ends], axis=1)
108
109 server.scene.add_arrows(
110 "/arrows/velocities",
111 points=velocity_points,
112 colors=(100, 200, 255), # Uniform light blue
113 shaft_radius=0.015,
114 head_radius=0.04,
115 head_length=0.08,
116 )
117
118 while True:
119 time.sleep(10.0)
120
121
122if __name__ == "__main__":
123 main()